Newest update: 8/14/99
Menu
Elma Beaucoups (8/14/99)
engineering solutions (7/28/99
current photos (7/11/99)
elbow technical (7/5/99)
shoulder technical (7/5/99)
brains technical (7/5/99)
|
TOP SECRET |
|
|
Project: EL BO Newest update: 8/14/99 Menu Elma Beaucoups (8/14/99) engineering solutions (7/28/99 current photos (7/11/99) elbow technical (7/5/99) shoulder technical (7/5/99) brains technical (7/5/99) |
|
|
Project History This is an early artist's concept of the EL BO 1000. As you can see, the robot recruits human assistance to exhibit phototropic (light seeking) behavior. EL BO is short for Elma Beaucoups. The 1000 stands for nothing. It just sounds cool. |
|
|
After research indicated that the above robot would be economically unfeasable, we arrived at this new improved artist's concept. In this form, the robot is basically an arm which is independently phototaxic (aligns with light.) |
|
|
The Name: Elma Beaucoups is a flower at heart, and a machine in body. The name came after I spent 2 months calling Elma "the elbow" which turned to "EL BO" and later, after being jokingly prodded by most of my friends about how it was my new girlfriend (and was going to keep me warm at night,) the name changed a lot. A few examples: "Eliza Bonita," "Ellie Bowler." The name that stuck was finally "Elma Beaucoups," which translates from French to "Lots and lots of Elma." Oui! Oui! Oui! |
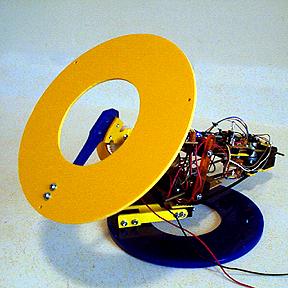
The Parallax Basic Stamp MicrocontrollerCurrent Specs & Info:Elma Beaucoups was designed to be an autonomous phototaxic robot arm. For portability, I wanted all necessary electonics to be mounted on the arm (instead of tethering the thing to a PC.) Since it was my first robot I guess I had to do everything the hard way. Elma was built from scratch. A lot of people talk about not wanting to redesign the wheel, and while I can see the rationale, I wanted to really learn the nuts and bolts of robotics. Looking back on it, life would have been a lot easier using servos, and sometimes I regret not using them. At the same time, though, shaft encoders are really neato. Elma's brain is a Basic Stamp 2 (BS2.) Elma is also equipped with a dual H-Bridge to drive the motors, and an IR remote system which operates using Dial Tone Multi-Frequency tones to transfer information. Elma talks to the world via beeps through a simple amplifier circuit & speaker. To increase the number of I/O pins available, Elma is equipped with a parallel-in serial-out 8 bit shift register. The flower is a piece of origami. Without it Elma looks kind of strange. |
|
|
|
|
Building a hobby robot without model airplane servos.One gear head DC motor drives the shoulder via a drive chain system, which provides further reduction. The elbow is driven with a DC motor using a worm gear drive train scavenged from a defunct VCR.Elma Beaucoups can operate autonomously using photoresistors to display phototaxic behaviors. The robot has only two degrees of freedom. An optical shaft encoder is used to determine shoulder position and a bend sensor provides elbow position. Since both encoders are absolute, no limiting switches have been installed. The IR remote can be used to tell Elma to rotate to a certain angle and bend the elbow to a certain angle. It is also possible to drive the elbow & shoulder continuously via remote control. Elma is tethered to a 9 volt AC to DC converter. Some of the electronics and the motors run at 9 volts. Everything else runs at 5 volts, which is supplied by the BS2. |
|
|
|
Major Problems Encountered: |
|
|
Building a hobby robot with surplus electronics partsTime to build: So far around 3 months, working whenever I get a chance.Cost: Not counting man-hours, probably around $300 for everything currently installed. Tool purchases and R&D costs are probably significantly higher than that. Other important information: If you have ever dreamed of creating a robot I would very stongly encourage you to start today. It is a great learning experience, and a lot of fun. While it is really cool and challenging to build something you can direct via remote control, it is another thing altogether to see something you built make decisions and move on its own. Even though I had a vision of what it would be like, when Elma finally became autonomous it really freaked me out somehow. It's like being Dr. Frankenstein. Oh! And your friends will enjoy playing with it. Future Directions: Besides tiny system upgrades and improvements, I am considering motion detection and other sensor arrays for Elma Beaucoups. I also have ideas for two other robots now. |
|
Older News & Photos |
|
|
|
I started this project about three or four months ago. |
|
|
In the meantime, I have burned out an LED or two, a bunch of transistors, an IR sensor package, a couple chips, and have gone through quite a few inadequate motors. The design is being carried out modularly, building sections, doing programming, and making sure they work to spec (i.e. reliably and with more than enough power) while assembling. |
|
All this stuff copyright, 1999 Dave Benz |