Believe it or not, the current design came from ideas about the Sony Aibo, a project my friend Jeff did, and an idea for an ultimate mean-ass "battle bot" I dreamed up while doing research on Elma Beaucoups.
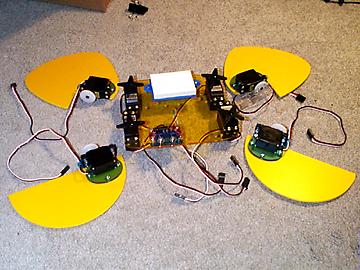
Dig the crab.
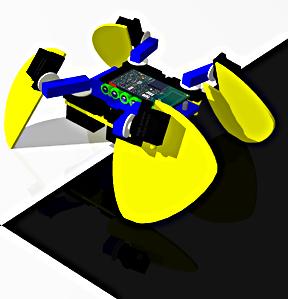
1. Build an extremely simple walker and get it walking.
2. Make sure it's neato (and easy to modify.)
3. Goal number 3 is not yet declassified.
Depending on the success, programming complexity, and load-bearing ability of this design, I may add one more joint to each leg, giving it 12 DOF.
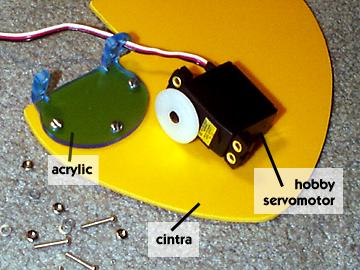
Hobby servomotors are used in remote control planes, cars, and boats to control rudders and steering and such. They are also ideal for use in hobby robotics. They have serious gear reduction so they're pretty powerful, and also have control electronics built in so you can tell them what position to turn to.

One of the unfortunate things about robots is the amount of wires and cables you end up with, and it becomes such a problem that one is often forced to come up with creative solutions.
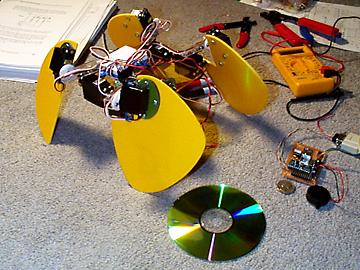
This was actually a good thing, because although I had some ideas about how to program the thing to walk, it wasn't until I got a chance to play around with it that I saw how to do it.
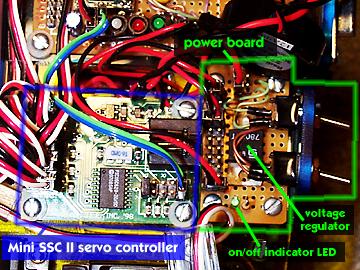
Also, the board takes 9 volts from one of the batteries and supplies two different voltages (9 and 5 volts) for different electronics in the robot.
A on/off indicator LED may seem pretty silly to get excited about, but it comes in handy when you are experiencing power problems.
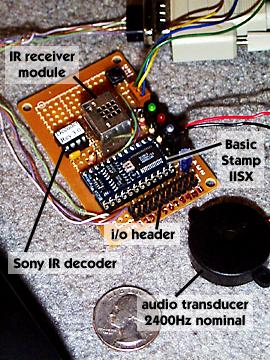
The Sony IR decoder chip there is yet another PIC micro, programmed and sold by the guy who built the "Cricket Robot" - Henry Arnold. It uses the IR receiver module to decode the signals from a Sony TV or VCR remote control. Of course, you can also get a universal remote and program it for Sony. A great chip!
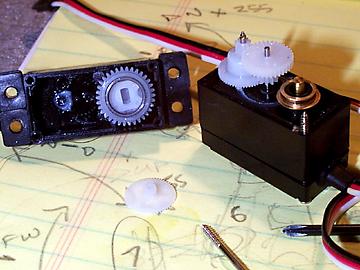
Guess now we know how well servos deal with repeated impacts.
Turned out I wasn't sending the serial info to the controller at the right baud rate.

Fortunately, it is possible to order gear sets for servos, and they're cheap. Did I mention that the best place to get servos is Tower Hobby? Three days later I was up and running again. Now that I have the perspective of many years I think that I should have built something with wheels. I mean it's not as cool, but as the iRobot Roombas have shown, wheels are more practical I think.